Режим "Без насадки" позволяет управлять манипулятором без установки насадки.
Для управления манипулятором в режиме "Механический захват" сначала установите модуль захвата механического.
Для управления манипулятором в режиме "Вакуумный захват" установите модуль захвата вакуумного.
Проверьте подключение к манипулятору.
В верхней части панели управления манипулятором нажмите кнопку "Настройка".
Отобразится выбор способов настройки манипулятора:
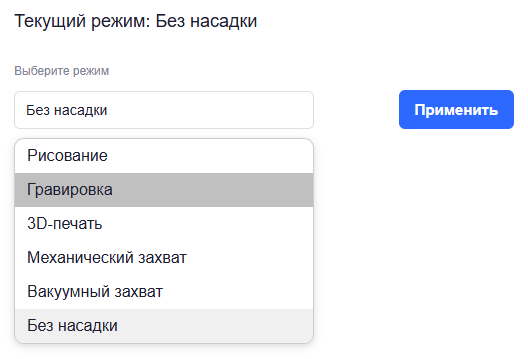
Выберите режим в зависимости от установленной насадки или "Без насадки" и нажмите "Применить".
Для управления манипулятором выберите один способов:
- "Свободная настройка" – способ позволяет узнать, как работает M Edu и какие основные функции выполняет.
- "C++ / Python" – способ позволяет самостоятельно написать код алгоритма поведения манипулятора на языках Blockly/C++/Python.

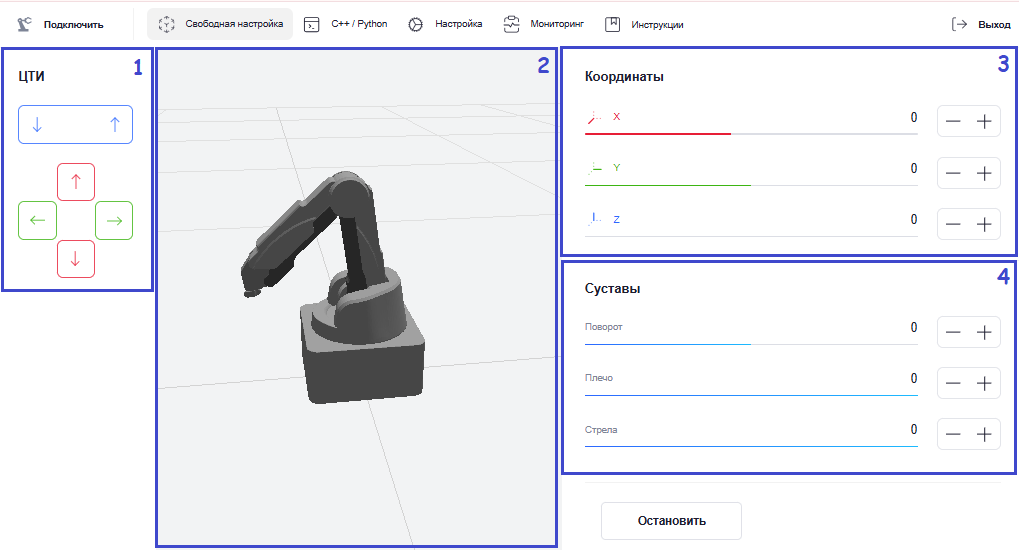
Панель управления "Свободная настройка" в режиме "Без насадки" содержит:
- Кнопки управления "ЦТИ" (Центральная Точка Инструмента) – поочередно нажимая кнопки направления ЦТИ вы можете наблюдать за перемещением поворотных узлов манипулятора.
- Виртуальная среда – воспроизводит движения настоящего манипулятора в виртуальной среде. С помощью курсора мыши виртуальный манипулятор можно приблизить, отдалить и рассмотреть со всех сторон.
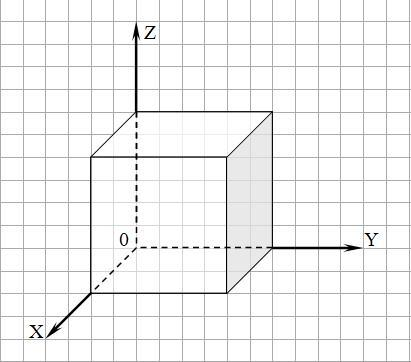
"Координаты" – управление манипулятором в трехмерной системе координат. Система координат манипулятора задана тремя взаимно перпендикулярными линиями. Начало координат – исходное положение манипулятора (оси X, Y) и поверхность, на которую он установлен (ось Z).
- Ось "X" – горизонтальная ось, простирающаяся вперед и назад.
- Ось "Y" – горизонтальная ось, простирающаяся налево и направо.
- Ось "Z" – вертикальная ось, простирающаяся вверх.
- "Суставы" – управление поворотными узлами манипулятора:
С помощью кнопки "Остановить" манипулятор можно остановить во время движения.

Панель управления "Свободная настройка" в режиме "Механический захват" содержит:
- Кнопки управления "ЦТИ" (Центральная Точка Инструмента) – поочередно нажимая кнопки направления ЦТИ вы можете наблюдать за перемещением поворотных узлов манипулятора.
- Виртуальная среда – воспроизводит движения настоящего манипулятора в виртуальной среде. С помощью курсора мыши виртуальный манипулятор можно приблизить, отдалить и рассмотреть со всех сторон.
"Координаты" – управление манипулятором в трехмерной системе координат. Система координат манипулятора задана тремя взаимно перпендикулярными линиями. Начало координат – исходное положение манипулятора (оси X, Y) и поверхность, на которую он установлен (ось Z).
- Ось "X" – горизонтальная ось, простирающаяся вперед и назад.
- Ось "Y" – горизонтальная ось, простирающаяся налево и направо.
- Ось "Z" – вертикальная ось, простирающаяся вверх.
- "Суставы" – управление поворотными узлами манипулятора:
- "Механический захват" – управление насадкой:
- "Сжатие" – изменяет угол раскрытия когтей.
- "Поворот насадки" – изменяет угол поворотного узла J4 (положительное направление – против часовой стрелки).
- "Сжатие" – изменяет угол раскрытия когтей.
С помощью кнопки "Остановить" манипулятор можно остановить во время движения.
Blockly – это способ управления манипулятором с помощью визуального языка программирования Google Blockly. Можно создавать алгоритмы и задавать поведение устройства, перетаскивая блоки с командами.
C++ (или просто "плюсы") – это язык программирования, который позволяет создавать сложные и быстрые программы. Он используется, когда важна высокая производительность, например, для разработки игр или сервисов, где нужно обрабатывать много данных быстро.
Python – это более простой и удобный язык для начинающих. Он подходит для самых разных задач: от создания игр и сайтов до машинного обучения и научных исследований. Python легко учить, и на нём можно быстро писать программы.
C++ и Python – это два разных языка, и каждый из них лучше подходит для своих задач. Но у них есть общее: оба поддерживают объектно-ориентированное программирование (ООП), что позволяет создавать программы, основанные на объектах и их взаимодействии.
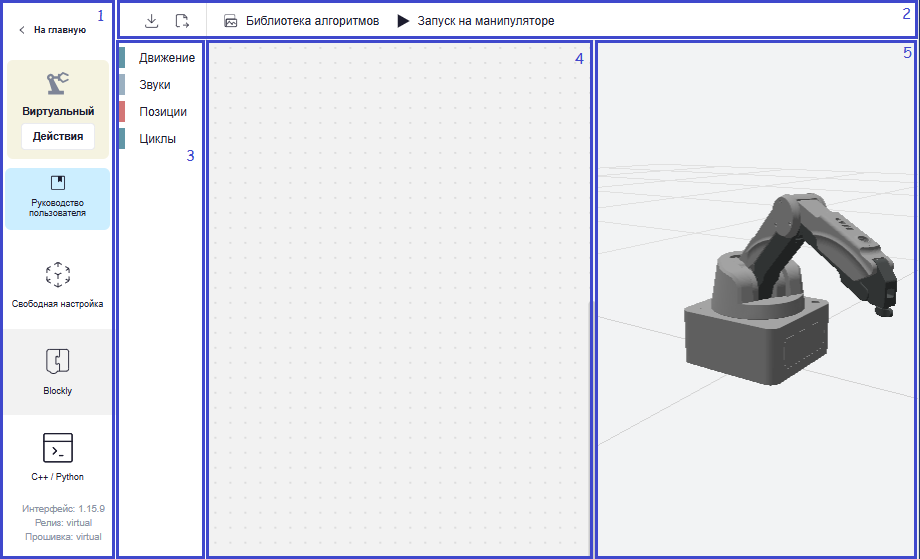
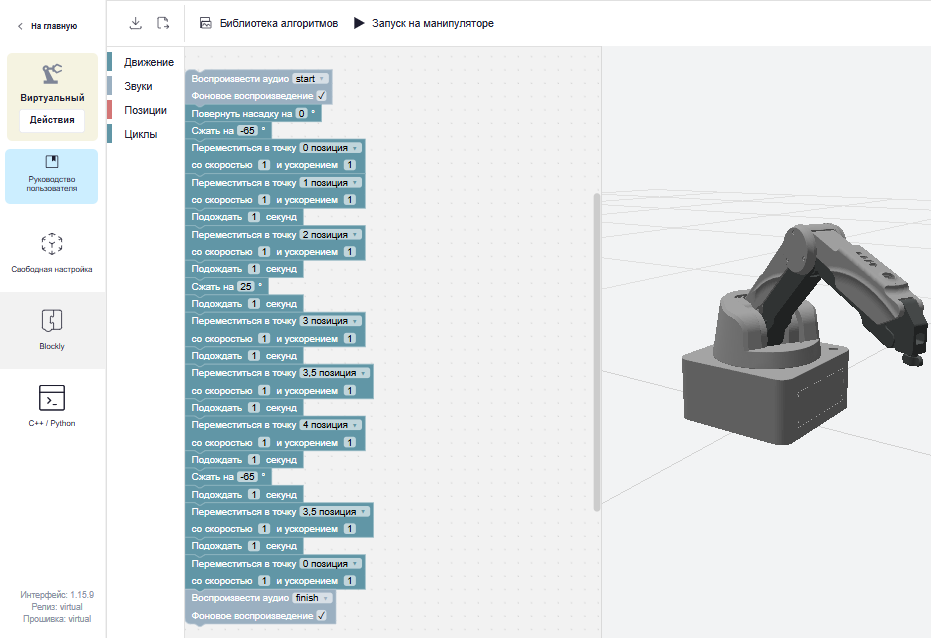
Панель управления Blockly:
- Панель для перехода к другим способам настройки – позволяет вернуться в Главное меню, подключить/отключить манипулятор, открыть данное руководство пользователя и перейти в другой способ настройки.
Кнопки быстрого действия:

скачать алгоритм программы в текстовом формате

открыть список готовых алгоритмов 
загрузить алгоритм программы в текстовом формате

запуск на манипуляторе
- Библиотека блоков – содержит разделы блоков.
- Рабочая область – область для построения алгоритма.
- Виртуальная среда – воспроизводит движения настоящего манипулятора в виртуальной среде. С помощью курсора мыши виртуальный манипулятор можно приблизить, отдалить и рассмотреть со всех сторон.
Для построения алгоритма выберите нужнsq блок из библиотеки блоков и с помощью курсора перетащите его в рабочую область.
- Раздел "Движение":
- "Переместиться в точку X со скоростью 1 и ускорением 1", где X – это выбор позиции, 1 – это процент от максимальных скорости и ускорения движения манипулятора;
- "Подождать t секунд", где t – это время ожидания манипулятора;
"Вакуумный захват Включен/Выключен" – включение насоса либо выключение насоса.
- "Повернуть насадку на Nº" – изменить угол поворотного узла J4, где N – угол разворота поворотного модуля инструмента.

- Раздел "Звуки":
- "Воспроизвести аудио {sound, start, finish, wait} Фоновое воспроизведение {флаг}", где sound – звук, start – начинать, finish – заканчивать, wat – что, флаг – воспроизвести выбранное аудио с возможностью фонового воспроизведения.

- "Воспроизвести аудио {sound, start, finish, wait} Фоновое воспроизведение {флаг}", где sound – звук, start – начинать, finish – заканчивать, wat – что, флаг – воспроизвести выбранное аудио с возможностью фонового воспроизведения.
Раздел "Позиции" содержит кнопку "Добавить позицию", при нажатии на которую открывается форма для создания позиции манипулятора.

Форма содержит:
- "Наименование" – это X в "Переместиться в точку X за t секунд";
- "Продолжительность, сек" – это t в "Переместиться в точку X за t секунд";
- "Life-режим" – разрешает движение манипулятора только по кнопке "Запуск на манипуляторе".
- "Настроить поворот" – настройка позиции стрелы манипулятора двумя способами:
- "Градусы" – настройка позиции путем определения значения угла поворотного узла;
- "Координаты" – настройка позиции в трехмерной системе координат.

- "Сохранить" – сохранить позицию.
- "Остановка" – остановить манипулятор во время настройки позиции.
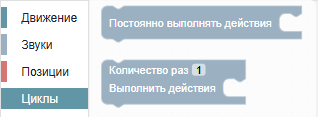
- Раздел "Циклы":
- "Постоянно выполнять действия", используется совместно с блоками из других разделов.
- "Количество раз N Выполнять действия", где N – количество повторений совместно используемого блока.
При нажатии на блок-команду правой кнопкой мыши блок можно изменять.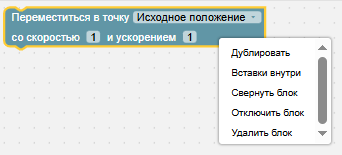
Процесс построения алгоритма:
- Создайте позиции, то есть точки, между которыми манипулятор будет выполнять перемещение.
- Добавьте в рабочую область блоки из раздела "Движение" – в каждом блоке должна быть указана позиция, в которую необходимо переместиться.
- Добавьте в рабочую область блоки "Подождать t секунд" и "Воспроизвести аудио {sound, start, finish, wait} Фоновое воспроизведение {флаг}".
- Соедините блоки друг с другом в правильном порядке, чтобы движение между точками выполнялось последовательно.
Можно использовать Библиотеку алгоритмов – содержит готовые алгоритмы:
- Нажмите кнопку "Библиотека алгоритмов". Отобразится форма выбора алгоритма.
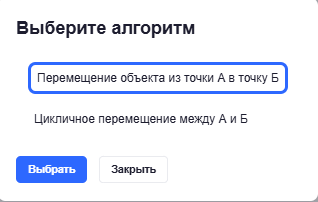
- Выберите алгоритм и нажмите кнопку "Выбрать". Готовый алгоритм отобразится в рабочей области.
- Запустите выполнение алгоритма на манипуляторе, нажав кнопку "Запуск на манипуляторе".
Панель управления C++ / Python:
- Панель для перехода к другим способам настройки – позволяет вернуться в Главное меню, подключить/отключить манипулятор, открыть данное руководство пользователя и перейти в другой способ настройки.
Кнопки быстрого действия:
скачать алгоритм программы в текстовом формате
загрузить алгоритм программы в текстовом формате

удалить алгоритм

писать алгоритм на языке Python

писать алгоритм на языке C++

открыть список поддерживаемых функций
запуск на манипуляторе
- Рабочая область – предназначена для самостоятельного написания кода алгоритма поведения манипулятора на языках C++/Python. Для написания кода воспользуйтесь подсказками по кнопке "Справка".
- Виртуальная среда – воспроизводит движения настоящего манипулятора в виртуальной среде. С помощью курсора мыши виртуальный манипулятор можно приблизить, отдалить и рассмотреть со всех сторон.

Напишите код самостоятельно или загрузите готовый с помощью кнопки ![]() .
.
"Руководство пользователя" – кнопка перехода в данное руководство.