Для управления манипулятором в режиме Механический захват сначала установите модуль захвата механического .
Проверьте подключение к манипулятору.
В Главном меню приложения нажмите кнопку «Механический захват».
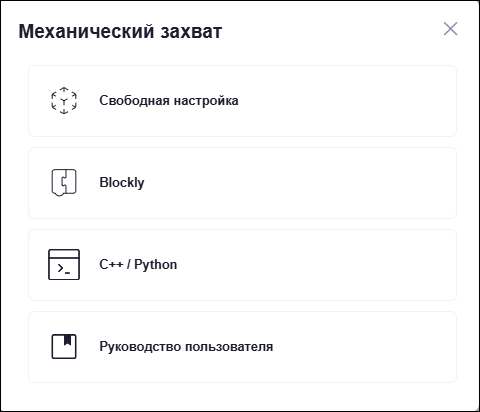
Отобразится выбор способов настройки манипулятора:
| Раскрыть | ||
|---|---|---|
| ||
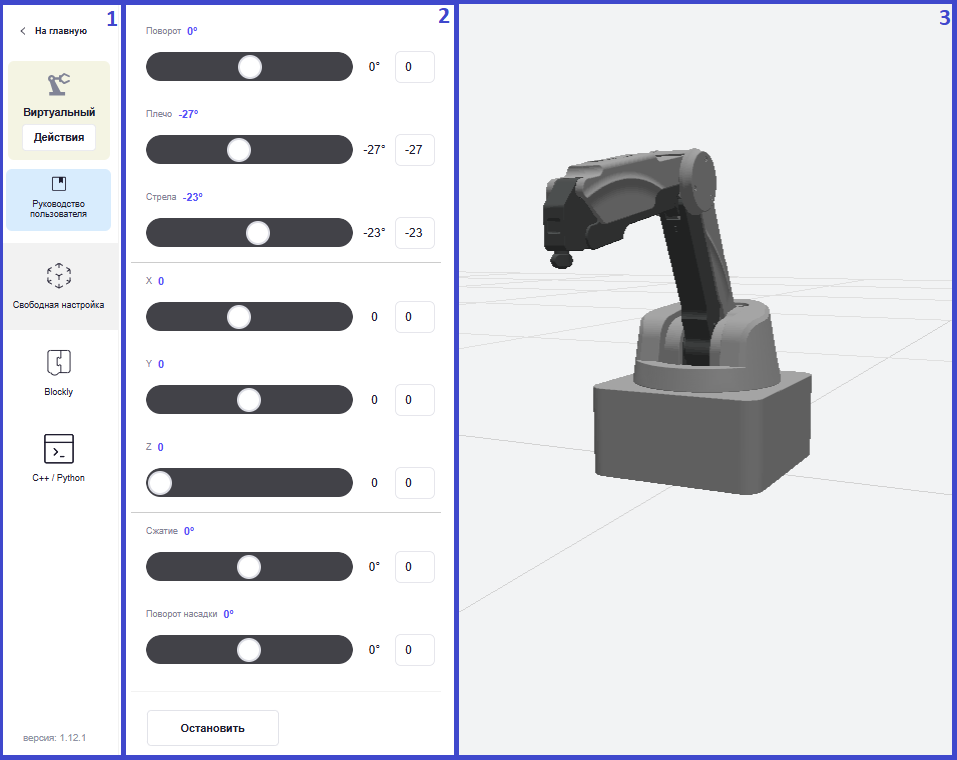
Свободная настройка – это простой способ настроить манипулятор M Edu с механическим захватом. Способ позволяет узнать как работает устройство и какие основные функции выполняет. Панель управления Свободная настройка:
Управлять манипулятором можно двумя способами: либо двигать ползунки, либо вручную вводить числа в поле рядом с ползунком. Управление поворотными узлами манипулятора:
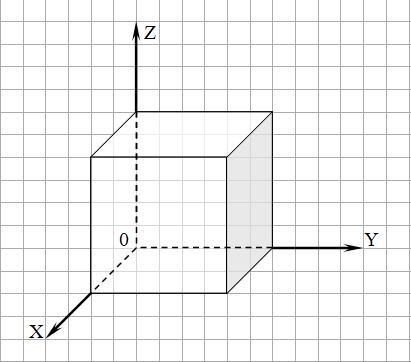
Управление манипулятором в трехмерной системе координат:
С помощью кнопки «Остановить» манипулятор можно остановить во время движения. |
...
| title | Blockly |
|---|
Blockly – это способ управления манипулятором с помощью визуального языка программирования Google Blockly. Можно создавать алгоритмы и задавать поведение устройства, перетаскивая блоки с командами.
Панель управления Blockly:
...
Кнопки быстрого действия:
...
![]()
...
скачать алгоритм программы в текстовом формате
...
![]()
...
![]()
...
загрузить алгоритм программы в текстовом формате
...
![]()
...
запуск на манипуляторе
...
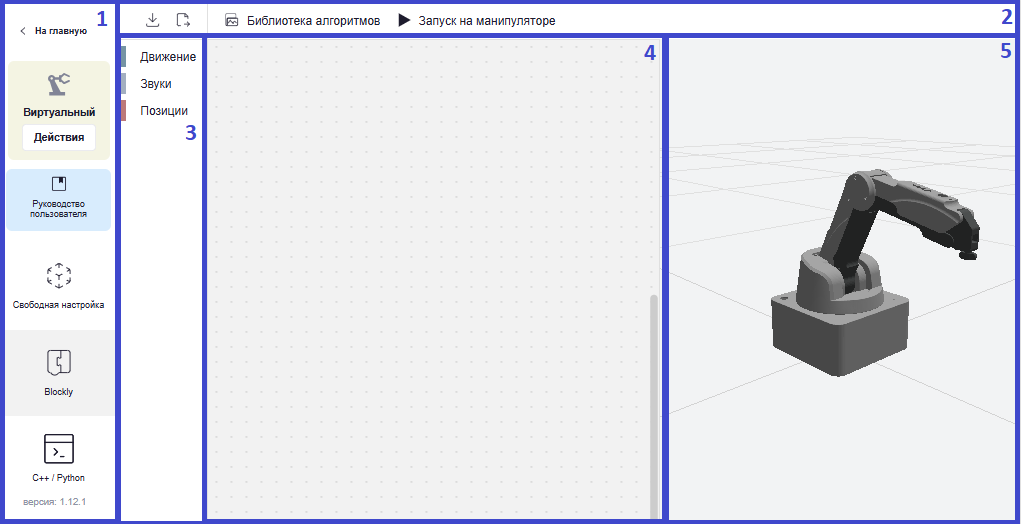
Для построения алгоритма выберите нужную блок-команду из библиотеки блоков и с помощью курсора перетащите его в рабочую область.
Раздел
...
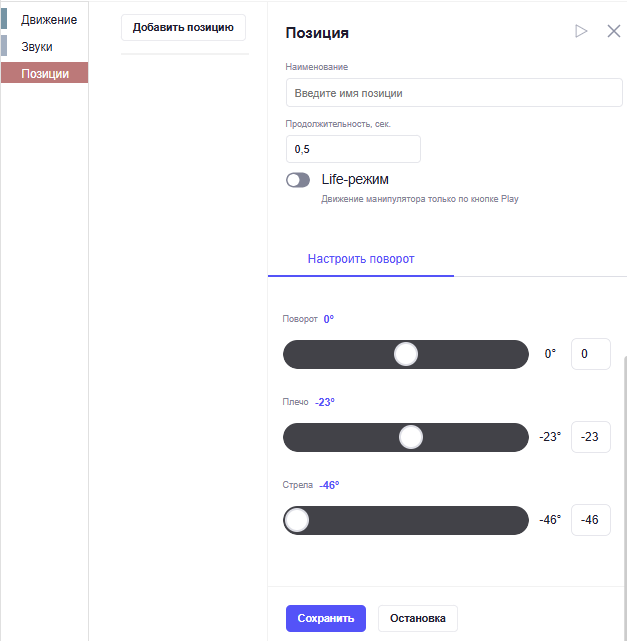
Форма содержит:
- «Наименование» – это X в «Переместиться в точку X за t секунд»;
- «Продолжительность, сек» – это t в «Переместиться в точку X за t секунд»;
- «Life-режим» – разрешает движение манипулятора только по кнопке Play.
- «Настроить поворот» – настройка позиции стрелы манипулятора.
- «Сохранить» – сохранить позицию.
- «Остановка» – остановить манипулятор во время настройки позиции.
При нажатии на блок-команду правой кнопкой мыши блок можно изменять.
Процесс построения алгоритма:
- Создайте позиции, то есть точки, между которыми манипулятор будет выполнять перемещение.
- Добавьте в рабочую область блоки-команды из раздела «Движение» – в каждой блок-команде должна быть указана позиция, в которую необходимо переместиться.
- Добавьте в рабочую область блоки-команды «Подождать t секунд» и «Воспроизвести аудио {sound, start, finish, wait} Фоновое воспроизведение {флаг}».
- Соедините блок-команды друг с другом в правильном порядке, чтобы движение между точками выполнялось последовательно.
Можно использовать Библиотеку алгоритмов – содержит готовые алгоритмы:
...
| Раскрыть | ||
|---|---|---|
| ||
См. раздел C++ / Python |
Руководство пользователя – кнопка перехода в данное руководство.
в разработке.