Для управления манипулятором в режиме Вакуумный захват установите модуль захвата вакуумного.
Проверьте подключение к манипулятору.
В Главном меню приложения нажмите кнопку «Вакуумный захват».
Отобразится выбор способов настройки манипулятора:
 Image Removed
Image Removed
| Раскрыть |
|---|
|
Свободная настройка – это простой способ настроить манипулятор M Edu с вакуумным захватом. Способ позволяет узнать как работает устройство и какие основные функции выполняет. Панель управления Свободная настройка: - Панель для перехода к другим способам настройки – позволяет вернуться в Главное меню, подключить/отключить манипулятор, открыть данное руководство пользователя и перейти в другой способ настройки.
- Рабочая область – позволяет управлять манипулятором.
- Виртуальная среда – воспроизводит движения настоящего манипулятора в виртуальной среде. С помощью курсора мыши виртуальный манипулятор можно приблизить, отдалить и рассмотреть со всех сторон.
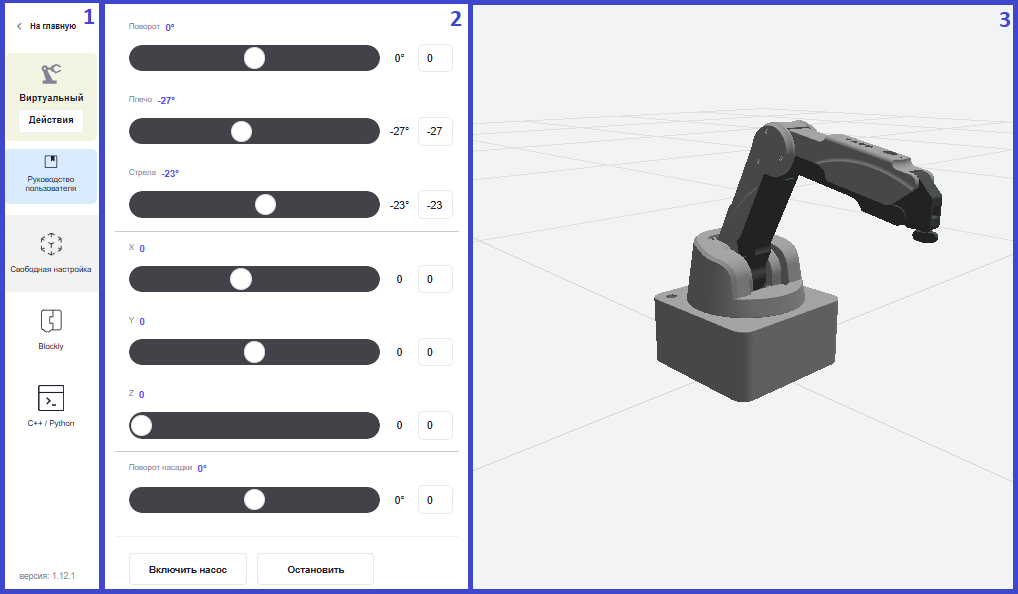 Image Removed Image Removed
Управлять манипулятором можно двумя способами: либо двигать ползунки, либо вручную вводить числа в поле рядом с ползунком. Управление поворотными узлами манипулятора: - Поворот – изменяет угол поворотного узла J1;
- Плечо – изменяет угол поворотного узла J2;
- Стрела – изменяет угол поворотного узла J3.
Управление манипулятором в трехмерной системе координат: - ось X идет слева направо – направляет стрелу манипулятора по оси X;
- ось Y идет вперед и назад – направляет стрелу манипулятора по оси Y;
- ось Z идет вверх и вниз – направляет стрелу манипулятора по оси Z.
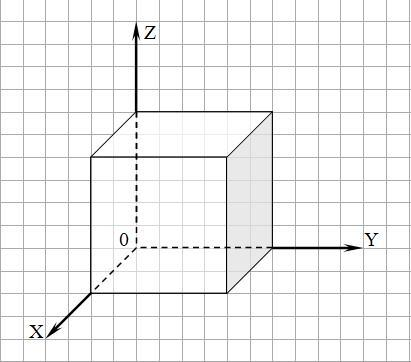 Image Removed Image Removed
- Поворот насадки – изменяет угол поворотного узла J4.
| Информация |
|---|
| При ручном вводе значений не забудьте нажать Enter для совершения движения манипулятором. |
Для включения насоса используется кнопка «Включить насос», для выключения – «Выключить насос». С помощью кнопки «Остановить» манипулятор можно остановить во время движения. |
...
Blockly – это способ управления манипулятором с помощью визуального языка программирования Google Blockly. Можно создавать алгоритмы и задавать поведение устройства, перетаскивая блоки с командами.
Панель управления Blockly:
...
Кнопки быстрого действия:
...
 Image Removed
Image Removed
Этот раздел объясняет, как создавать программы для управления учебным роботом-манипулятором с помощью языков программирования Blockly, Python, C++.
| Раскрыть |
|---|
| title | Подготовка к созданию программы |
|---|
|
Перед тем как начать программировать, убедитесь, что: - Вы подключены к роботу (если находитесь на сайте https://medu.promo-bot.ru/ функционал будет ограничен).
- К манипулятору подключена необходимая насадка "Механический захват", "Вакуумный захват" или же манипулятор стоит "Без насадки".
- В меню "Настройки" выбран один из трех режимов работы: "Без насадки", "Механический захват" или "Вакуумный захват" и нажата кнопка "Применить".
 Image Added Image Added
 Неправильный выбор режима приведет к ошибкам в движениях робота, а также ограничит набор блоков в "Blockly" Неправильный выбор режима приведет к ошибкам в движениях робота, а также ограничит набор блоков в "Blockly"
|
| Раскрыть |
|---|
| title | Выбор языка программирования |
|---|
|
На панели создания программ доступны три языка программирования: - Blockly – для начинающих. Визуальное программирование, подходит для первых экспериментов
- Python – для тех, кто готов перейти к текстовому коду
- C++ – для продвинутых пользователей и сложных сценариев
|
| Раскрыть |
|---|
|
 Image Added Image Added
Для построения алгоритма выберите нужную блок-команду из библиотеки блоков и с помощью курсора перетащите его  Image Removed Image Removed
| Кнопки быстрого действия:  Image Added Image Added
| Скачать – скачать алгоритм программы в текстовом формате |
 Image Removed Image Removed
| открыть список готовых алгоритмов |  Image Added Image Added
| Загрузить – загрузить алгоритм программы в текстовом формате |
 Image Removed Image Removed
| запуск на манипуляторе | - Библиотека блоков – содержит разделы блок-команд.
Рабочая область – область для построения алгоритма Image Added Image Added
| Удалить все – очистить рабочую область |  Image Added Image Added
| Запуск на манипуляторе - запускает созданную программу |  Image Added Image Added
| Загрузить аудиофайл с компьютера |
- Кнопки выбора языка программирования "Blockly", "Python", "C++".
- Виртуальная среда – воспроизводит движения настоящего манипулятора в виртуальной среде. С помощью курсора мыши виртуальный манипулятор можно приблизить, отдалить и рассмотреть со всех сторон.
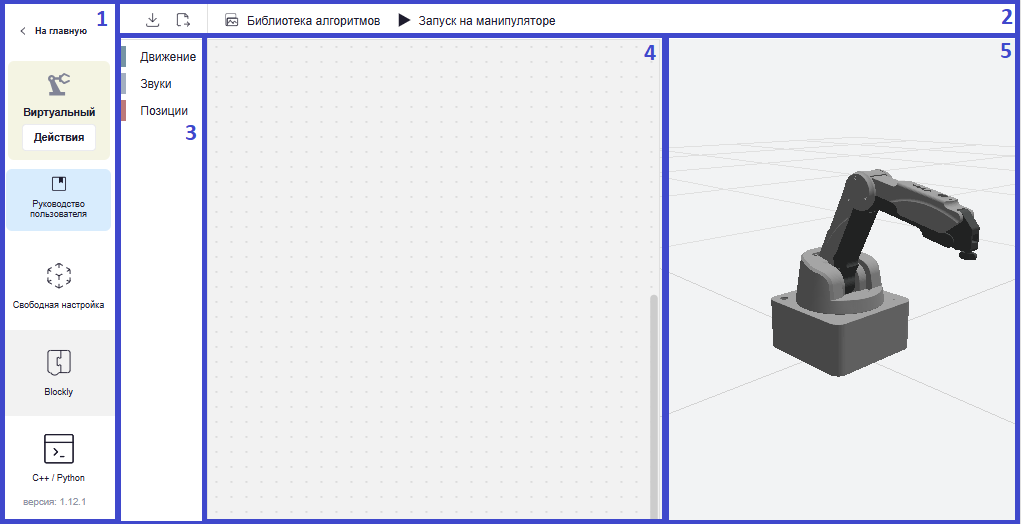 Image Removed Image Removed
- Поле "Результат выполнения программы" – отображает результат выполнения программы.
|
| Раскрыть |
|---|
| title | Программирование с Blockly (рекомендуется для начала) |
|---|
|
Основные шаги: - Нажмите кнопку "Blockly".
- Выберите нужные блоки из библиотеки и перетащите их в рабочую область.
Раздел «Движение»:Раздел «Звуки»:«Воспроизвести аудио {sound, start, finish, wait} Фоновое воспроизведение {флаг}», где sound – звук, start – начинать, finish – заканчивать, wat – что, флаг – воспроизвести выбранное аудио с возможностью фонового воспроизведения.
 Image RemovedРаздел «Позиции» содержит кнопку «Добавить позицию», при нажатии на которую открывается форма для создания позиции манипулятора. Image RemovedРаздел «Позиции» содержит кнопку «Добавить позицию», при нажатии на которую открывается форма для создания позиции манипулятора. Image Removed Image Removed
Форма содержит: - «Наименование» – это X в «Переместиться в точку X за t секунд»;
- «Продолжительность, сек» – это t в «Переместиться в точку X за t секунд»;
- «Life-режим» – разрешает движение манипулятора только по кнопке Play.
- «Настроить поворот» – настройка позиции стрелы манипулятора.
- «Сохранить» – сохранить позицию.
- «Остановка» – остановить манипулятор во время настройки позиции.
При нажатии на блок-команду правой кнопкой мыши блок можно изменять.
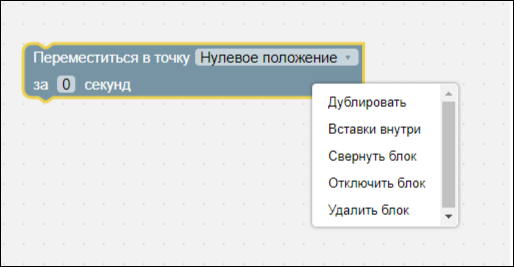 Image Removed Image Removed Процесс построения алгоритма: - Создайте позиции, то есть точки, между которыми манипулятор будет выполнять перемещение.
- Добавьте в рабочую область блоки-команды из раздела «Движение» – в каждой блок-команде должна быть указана позиция, в которую необходимо переместиться.
- Добавьте в рабочую область блоки-команды «Подождать t секунд» и «Воспроизвести аудио {sound, start, finish, wait} Фоновое воспроизведение {флаг}».
- Соедините блок-команды друг с другом в правильном порядке, чтобы движение между точками выполнялось последовательно.
Можно использовать Библиотеку алгоритмов – содержит готовые алгоритмы: Нажмите кнопку «Библиотека алгоритмов». Отобразится форма выбора алгоритма.
 Image RemovedВыберите алгоритм и нажмите кнопку «Выбрать». Готовый алгоритм отобразится в рабочей области. Image RemovedВыберите алгоритм и нажмите кнопку «Выбрать». Готовый алгоритм отобразится в рабочей области.
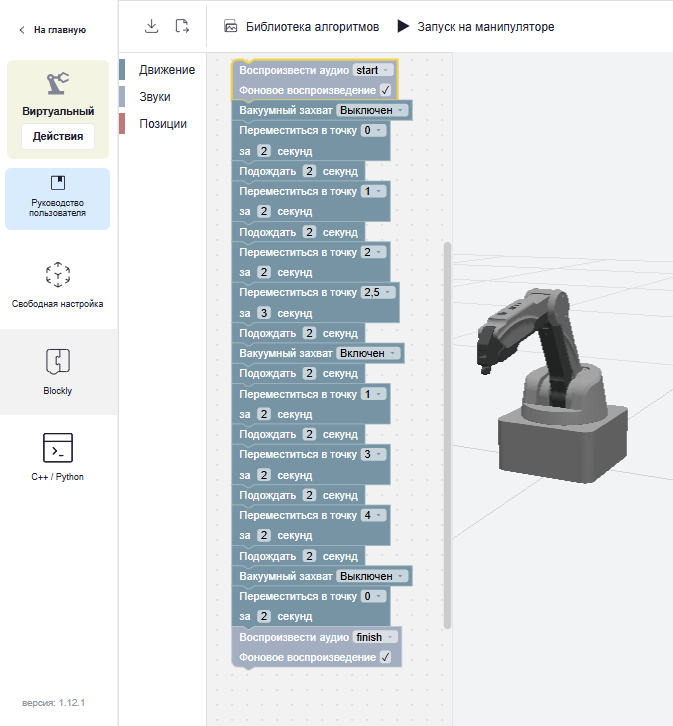 Image RemovedЗапустите выполнение алгоритма на манипуляторе, нажав кнопку «Запуск на манипуляторе». Image RemovedЗапустите выполнение алгоритма на манипуляторе, нажав кнопку «Запуск на манипуляторе». |
| Раскрыть |
|---|
|
См. раздел C++ / Python |
Руководство пользователя – кнопка перехода в данное руководство.
- Соедините блоки, чтобы создать алгоритм.
- Нажмите "Запуск на манипуляторе", чтобы проверить работу.
| Информация |
|---|
| Для получения краткой справки о функционале блока требуется навести на него курсор – отобразится всплывающая подсказка.  Image Added Image Added
Также по блокам "общего" функционала доступна справка по нажатию правой кнопки мыши.
 Image Added Image Added
|
Библиотека блоков содержит 12 категорий: | Раскрыть |
|---|
| Условия, сравнения  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|
|---|
 Image Added Image Added
|  Image Added Image Added
|
|
|
|
| Раскрыть |
|---|
| Вычисления, формулы  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|
|
| Раскрыть |
|---|
| Работа с текстом  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|
|
|
| Раскрыть |
|---|
| Создание и редактирование переменных  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|
|
|
| Раскрыть |
|---|
| Циклы  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|
|
|
|
| Раскрыть |
|---|
|
 Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
| |
|
| Раскрыть |
|---|
| Работа с элементами списков  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|  Image Added Image Added
|
|
|
| Раскрыть |
|---|
| Команды перемещения и работы с насадками  Image Added Image Added
|  Image Added Image Added
| Механический захват  Image Added Image Added
| Вакуумный захват  Image Added Image Added
|
|
| Раскрыть |
|---|
| Воспроизведение аудио с возможностью фонового режима  Image Added Image Added
Предустановлено 4 звуковых файла. Дополнительно можно загрузить файл в формате .wav - нажмите кнопку "Загрузить аудиофайл" и он появится для выбора в блоке | | | |
|
| Раскрыть |
|---|
| Сохранение и использование точек  Image Added Image Added
|
| Раскрыть |
|---|
| Работа с входами с датчиков и внешних устройств  Image Added Image Added
Данные пины расположены в разъеме UART.
 Image Added Image Added
|  Image Added Image Added
| | |
|
| Раскрыть |
|---|
| Работа с выходами на датчики и внешние устройства  Image Added Image Added
|  Image Added Image Added
| | |
|
Пример:
|
| Раскрыть |
|---|
| title | Программирование на Python |
|---|
|
Этот режим позволяет работать с текстовым кодом. Особенности:
Для создания программы с помощью языка программирования Python нажмите кнопку "Python". Отобразится интерфейс Python.  Image AddedВ Python уже отображается исходный код – минимальная заготовка для программы управления манипулятором. Image AddedВ Python уже отображается исходный код – минимальная заготовка для программы управления манипулятором.
Можно самостоятельно добавлять нужные строки кода, а можно написать программу в Blockly и она автоматически отобразится в строках кода Python. |
| Раскрыть |
|---|
| title | Программирование на C++ |
|---|
|
C++ – это компилируемый, статически типизированный язык программирования общего назначения. Используется для сложных сценариев и полного контроля над роботом. Основные особенности: Нет автоматической генерации кода. Программу нужно писать полностью вручную. Подходит для опытных учеников или выполнения олимпиадных задач.
|
