- Установите Поставьте манипулятор на плоскую ровную поверхность. Убедитесь, что вокруг него (в радиусе 0,5 метров относительно центральной вертикальной оси манипулятора отсутствуют посторонние предметыметра) нет никаких лишних предметов.
- Переведите тумблер включения питания манипулятора в положение «0»"0" (выключено).
- Установите нужный вам сменный модуль.
- Выберите подходящий способ подключения:подключение , как вы хотите подключить манипулятор:
| Раскрыть |
|---|
| title | Подключение к манипулятору монитора и элементов управления |
|---|
|
...
...
...
...
- Подключите монитор к манипулятору
|
...
- . Вставьте кабеля HDMI монитора в соответствующий разъем манипулятора.
- Подключите элементы управления (мышь, клавиатура) в разъем USB на панели манипулятора.
- Переведите тумблер включения питания
|
...
...
- "|" (включено).
- На мониторе отобразится загрузка ubuntu.
Прозвучит сигнал
|
...
"Система запущена. Внимание начинается процесс калибровки. Будьте осторожны, не касайтесь манипулятора и убедитесь, что посторонние предметы не помешают движению
|
...
устройства. Калибровка начнется через 5 4 3 2
|
...
1". Запустится калибровка: манипулятор должен сначала поднять стрелу вверх, затем совершить повороты влево вправо и остановиться в
|
...
исходном положении. По окончанию калибровке прозвучит сигнал: "Калибровка прошла успешно".
|
...
 Image Modified Image Modified
|
...
| Информация |
|---|
| Исходное положение манипулятора (или нулевое положение) – это стартовая позиция для манипулятора при его включении. При некорректной работе системы манипулятора, он возвращается к стартовой позиции, затем повторяет операцию. Это помогает манипулятору всегда иметь точку отсчета для работы. |
После загрузки рабочего стола
|
...
автоматически запустится приложение
|
...
Promobot M Control.
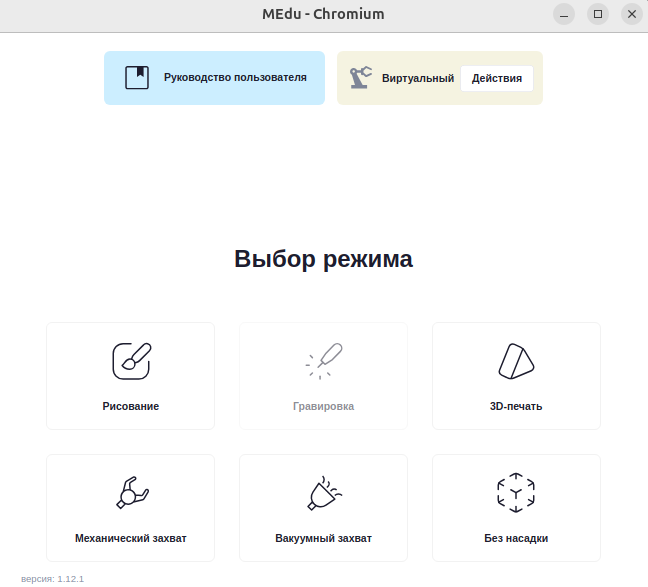 Image Modified Image Modified
| Информация |
|---|
| При первом запуске M Edu необходимо установить последнюю версию приложения |
:Закройте приложение.Запустите файл Medu_update на рабочем столе.
 Image RemovedОткроется диалоговое окно. Image RemovedОткроется диалоговое окно.
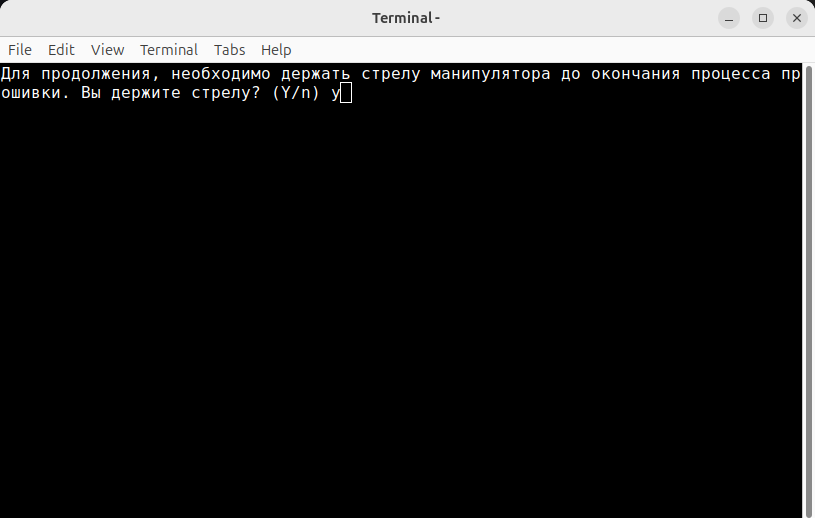 Image RemovedПридерживая стрелу манипулятора, введите Y и нажмите Enter. Image RemovedПридерживая стрелу манипулятора, введите Y и нажмите Enter.Обновление длится примерно 35 минут. По окончанию диалоговое окно закроется. Откройте Chromium и запустите приложение повторно. |
Подключите манипулятор – нажмите кнопку «Действия» – «Подключиться».
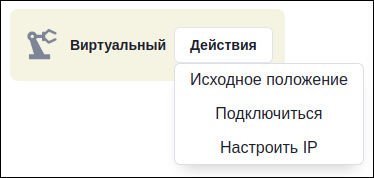 Image Removed
Image Removed
Статус подключения к манипулятору изменится на «Подключен». Манипулятор готов к работе.
 Image Removed
Image Removed
| Раскрыть |
|---|
| title | Подключение к манипулятору ПК через шнур сетевого интерфейса ETHERNET |
|---|
|
- Подключите блок питания манипулятора к разъему питания POWER 12V.
- Подключите блок питания к бытовой сети 230 В 50 Гц.
- Переведите к манипулятору и к розетке.
- Переведите тумблер включения питания манипулятора манипулятора в положение «|»"|" (включено).
Перед включением манипулятора прозвучит сигнал «Система "Система запущена. Внимание начинается процесс калибровки. Будьте осторожны, не касайтесь манипулятора и убедитесь, что посторонние предметы не помешают движению устройства. Калибровка начнется через 5 4 3 2 1»1". Запустится калибровка: манипулятор должен сначала поднять стрелу вверх, затем совершить повороты влево вправо и остановиться в начальном исходном положении. По окончанию калибровке прозвучит сигнал: "Калибровка прошла успешно". "
Image Added
| Информация |
|---|
| Исходное положение манипулятора (или нулевое положение) – это стартовая позиция для манипулятора при его включении. При некорректной работе системы манипулятора, он возвращается к стартовой позиции, затем повторяет операцию. Это помогает манипулятору всегда иметь точку отсчета для работы. |
На ПК откройте веб-браузер: Chrome, если используете ОС Windows;
откройте Chromium, если используете ОС Linux.
В адресной строке введите ip‑адрес манипулятора «10"10.5.0.2»2". Отобразится веб-интерфейс приложения Promobot M EduControl. - Нажмите кнопку «Действия» – «Подключиться».
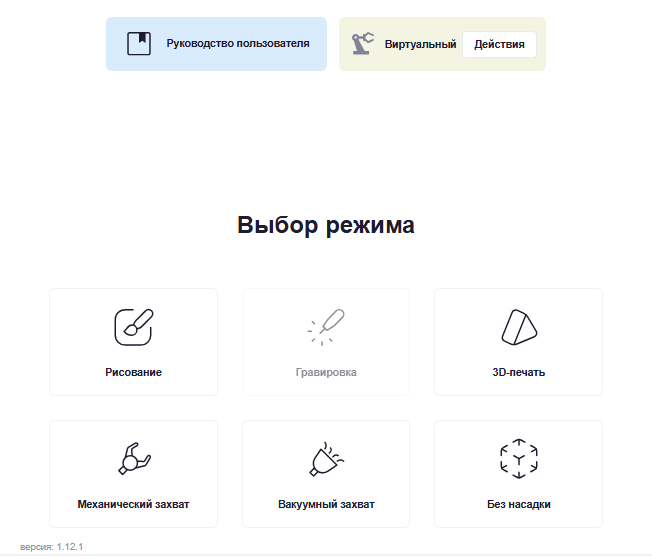 Image Added Image Added
|
После включения манипулятора и запуска приложения подключите манипулятор:
- Нажмите кнопку "Действия" – "Подключиться".
Image Added - Статус подключения к манипулятору изменится на
...
- "Подключен". Манипулятор готов к работе.
Исходное положение робота (или нулевое положение) – это стартовая позиция для манипулятора при его включении.
При некорректной работе системы манипулятора, он возвращается к стартовой позиции, затем повторяет операцию. Это помогает манипулятору всегда иметь точку отсчета для работы.
Image Added
В случае не успешного подключения, отобразится уведомление "Манипулятор не найден. Проверьте подключение и попробуйте снова".
 Image Added
Image Added
Нажмите кнопку "Повторить" для повторного подключения после проверки либо "Отмена" для закрытия уведомления.
Далее см. "Приложение Promobot M Control".
Для выключения манипулятора перейдите в раздел "Выключение M Edu".