...
| Раскрыть | ||
|---|---|---|
| ||
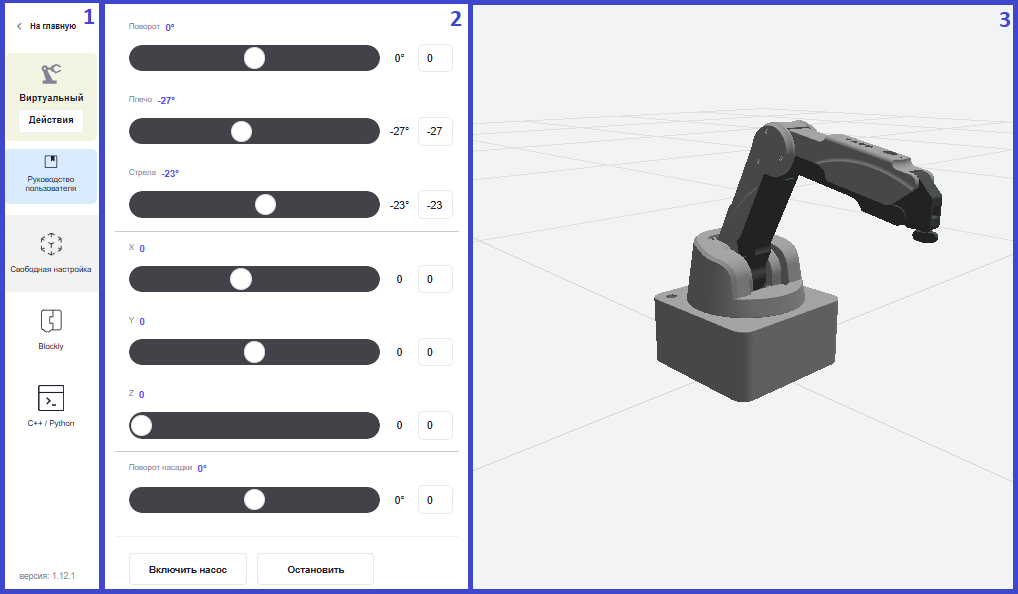
| Панель выбора способов настройки манипулятора позволяет вернуться в главное меню, подключить/отключить манипулятор, открыть «Свободная настройка» – способ свободной настройки, позволяет познакомиться с основными возможностями работы манипулятора M Edu это простой способ настроить манипулятор M Edu с вакуумным захватом. При выборе способа настройки манипулятора «Свободная настройка» в приложении M Edu отобразится панель управления манипулятором:
Способ позволяет узнать как работает устройство и какие основные функции выполняет. Панель управления Свободная настройка:
Область управления узлами поворота манипулятора содержит слайдеры для настройки значений угла поворота узла:
Управлять манипулятором можно двумя способами: либо двигать ползунки, либо вручную вводить числа в поле рядом с ползунком. Управление поворотными узлами манипулятора:
Управление манипулятором в трехмерной системе координат:
Для включения насоса используется кнопка «Включить насос», для выключения «Выключить насос». Во время движения манипулятор можно остановить с помощью кнопки «Остановить». Область воспроизведения движений манипулятора (виртуальная среда) воспроизводит движения настоящего манипулятора в виртуальной среде. С помощью курсора мыши виртуальный манипулятор можно приблизить, отдалить и рассмотреть со всех сторонС помощью кнопки Остановить манипулятор можно остановить во время движения. |

| Раскрыть | ||||||||
|---|---|---|---|---|---|---|---|---|
| ||||||||
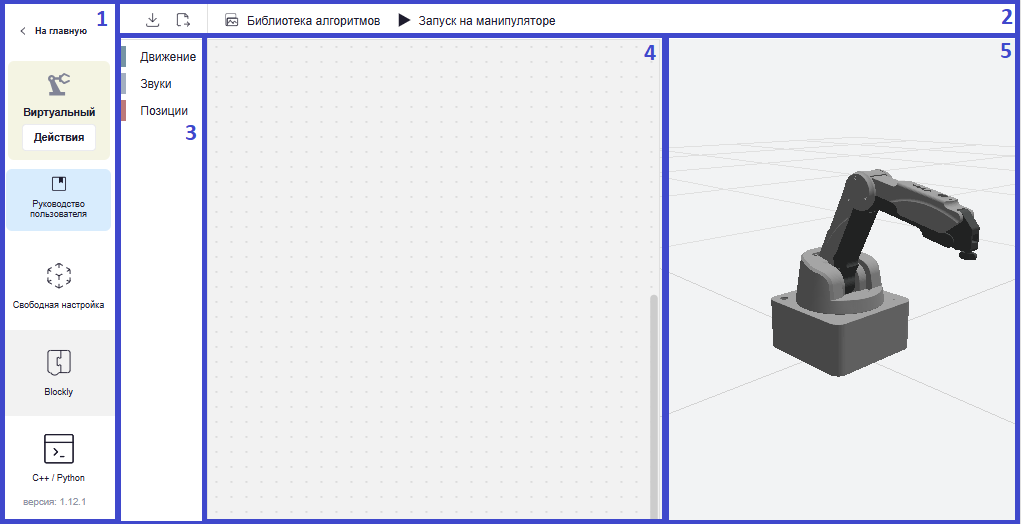
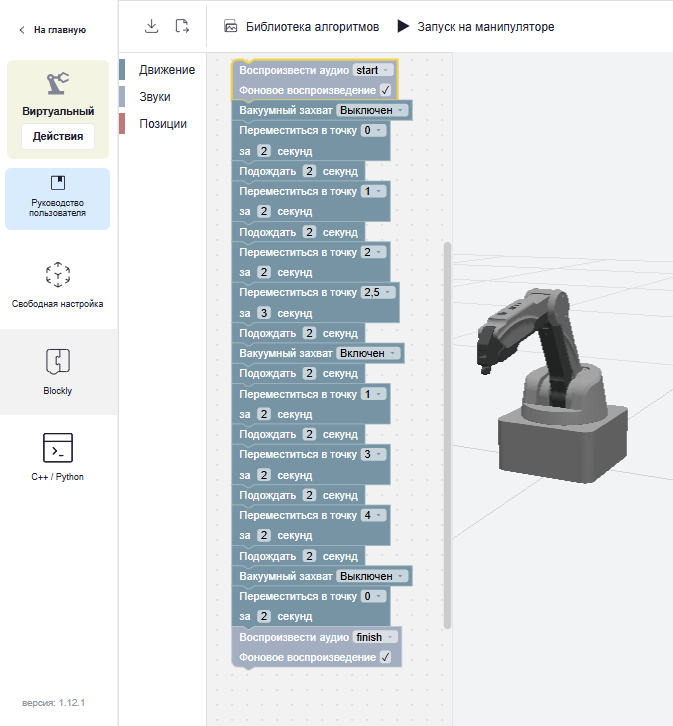
«Blockly» – способ предназначен для создания логики поведения манипулятора с помощью визуального языка программирования Blockly. Blockly – это визуальный язык программирования Google Blockly. Создание алгоритма Blockly осуществляется путем соединения блоков. Панель управления «Blockly» состоит из:
Панель настройки позволяет вернуться в главное меню, подключить/отключить манипулятор, открыть руководство пользователя и перейти в другой режим управления манипулятором. Кнопки быстрого действия:
Библиотека блоков содержит разделы блок-команд:
Форма содержит:
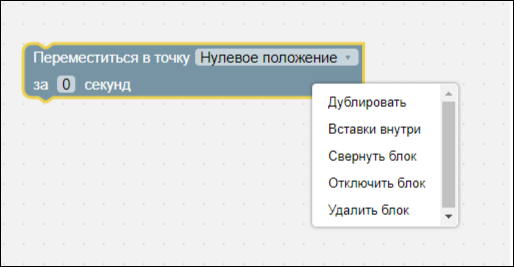
Рабочая область предназначена для построения логической структуры алгоритма. Для построения структуры выберите нужную блок-команду из библиотеки блоков и с помощью курсора перетащите его в рабочую область. При нажатии на блок-команду правой кнопкой мыши отображается контекстное меню:
Процесс построения алгоритма:
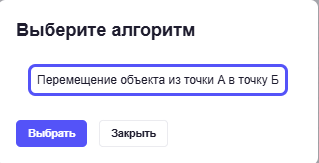
Библиотека алгоритмов содержит готовые алгоритмы:
Виртуальная среда воспроизводит движения настоящего манипулятора. С помощью курсора мыши виртуальный манипулятор можно приблизить, отдалить и рассмотреть со всех сторон. |



...